Синхронный и асинхронный электродвигатель отличия
Разница меж синхронным и асинхронным движком
Электродвигатели бывают 2-ух главных типов — синхронные и асинхронные. Что представляют собой те и остальные?
Что представляет собой синхронный движок?
К синхронным принято относить электродвигатели, которые работают на переменном токе и имеют ротор с частотой вращения, совпадающей с частотой оборотов магнитного поля в конструкции агрегата.
Главные элементы синхронного электродвигателя:
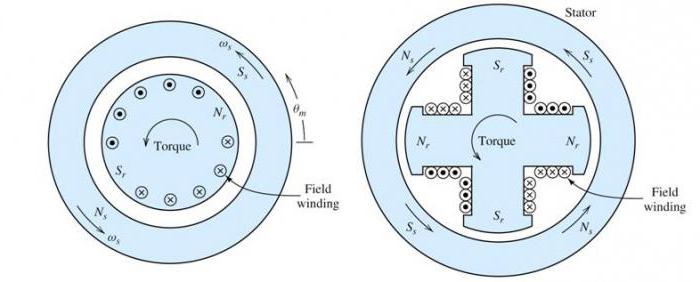
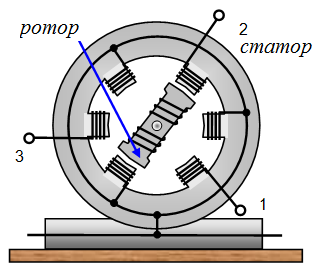
1-ый элемент агрегата размещается на статоре. Индуктор располагается на роторе, который разделен от статора воздушной прослойкой. Структура якоря представлена обмоткой (одной либо несколькими). Токи, которые подаются в соответственный элемент мотора, сформировывают магнитное поле, крутящееся с данной частотой и взаимодействующее с полем индуктора. Индуктор включает 2 полюса — в виде неизменных магнитов.
Синхронный агрегат может работать в 2-ух режимах:
- как фактически электродвигатель;
- как генератор.
1-ый режим работы подразумевает взаимодействие магнитного поля, формирующегося на якоре, и поля, которое появляется на полюсах индуктора. Синхронный движок в режиме генератора работает за счет электромагнитной индукции: в процессе вращения ротора магнитное поле, которое формируется на обмотке, по очереди ведет взаимодействие с фазами обмотки на статоре, вследствие чего же появляется электродвижущая сила.
Что представляет собой асинхронный электродвигатель?
К асинхронным принято относить электродвигатели, в каких частота вращения 1-го из главных частей — ротора — не совпадает с частотой оборотов магнитного поля, формирующегося током, который возникает на обмотке статора. Асинхронные агрегаты время от времени называются индукционными. Это обосновано тем, что в обмотке ротора осуществляется индуцирование тока при действии магнитного поля статора.

В конструкции асинхронного электродвигателя находятся статор и ротор, которые разбиты воздушной прослойкой. Главные активные элементы агрегата:
- обмотка;
- магнитопровод.
Важную роль в функционировании асинхронного мотора играют доп конструктивные элементы, которые обеспечивают крепкость, остывание и устойчивость работы агрегата.
Сопоставление
Основное отличие синхронного мотора от асинхронного заключается в соотношении величины частот вращения ротора и магнитного поля. В агрегате первого типа оба показателя однообразные. В асинхронной машине — различные.
Можно отметить, что электродвигатели второго типа в целом наиболее всераспространены, чем 1-ые. При всем этом асинхронные агрегаты почаще всего представлены в разновидности, в какой инсталлирован короткозамкнутый ротор. Данные устройства имеют ряд важных преимуществ перед электродвигателями других категорий. А конкретно:
- простота конструкции, надежность;
- относительно низкая себестоимость производства, эксплуатации;
- способность функционирования при задействовании имеющихся ресурсов сети без подключения преобразователей.
Вкупе с тем асинхронные машинки с короткозамкнутым ротором владеют и рядом недочетов. А конкретно:
- наличие малого пускового момента;
- наличие огромного пускового тока;
- пониженный коэффициент мощности;
- низкая маневренность исходя из убеждений регулирования скорости;
- зависимость наибольшей скорости от частоты электронной сети;
- электромагнитный момент в асинхронных движках рассматриваемого типа характеризуется мощной чувствительностью к понижению напряжения в сети.
В свою очередь, у синхронных агрегатов также есть бесспорные плюсы. К таким можно отнести:
- относительно невысокую чувствительность к перепадам напряжения в сети;
- стабильность вращения вне зависимости от перегрузки на ротор.
Есть у синхронных движков и недочеты:
- относительная сложность конструкции;
- сложность пуска ротора в ход.
Отмеченные индивидуальности работы синхронных и асинхронных агрегатов делают хорошим внедрение первых в случае, если требуемая мощность мотора в системе (к примеру, как части инфраструктуры фабричной полосы) обязана составлять порядка 100 кВт и наиболее. В других вариантах задействование асинхронных машин, обычно, становится наиболее желаемым.
Рассмотрев, в чем разница меж синхронным и асинхронным движком, отразим выводы в таблице.
Источник: thedifference.ru
Асинхронные и синхронные движки
Чтоб производственные механизмы работали с наибольшей эффективностью, нужно верно подобрать электронный движок, который будет применяться в качестве привода. В данной нам статье мы разглядим, чем различаются асинхронные и синхронные движки исходя из убеждений конструктивных особенностей, функциональности и экономичности.
Асинхронные и синхронные движки: устройство
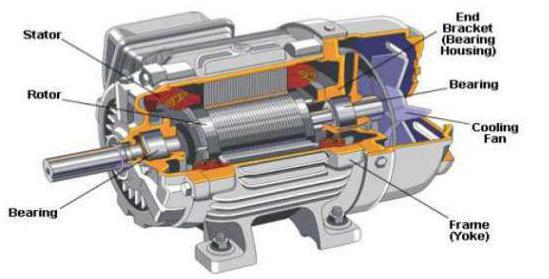
Электронные движки представляют собой агрегаты для преобразования электроэнергии в энергию механическую. Базу конструкции мотора (как синхронного, так и асинхронного типа) составляют последующие элементы:
- недвижный (статор);
- крутящийся (ротор).
Статоры электродвигателей обеих категорий имеют похожий принцип устройства. В особые пазы (осевые прорези) уложены токонесущие проводки из меди либо алюминия. Функцией статора является создание вращающегося магнитного поля. Ротор (с обмоткой возбуждения) закреплен на валу мотора и вращается под действием возникающей электродвижущей силы.
В чем ключевое отличие синхронного мотора от асинхронного
Основное отличие синхронного от асинхронного мотора заключается в устройстве ротора.
Роторы синхронных движков представляют собой неизменные либо электронные магниты. Неизменное магнитное поле, создаваемое ими, ведет взаимодействие с вращающимся магнитным полем статора.
В случае с асинхронным движком (который также именуют индукционным) в пазы ротора вставляются короткозамкнутые железные пластинки. Не считая короткозамкнутой разновидности, используются также фазные роторы, снабженные контактными кольцами, которые опосля разбега замыкаются накоротко.
В итоге соотношение частоты оборотов мотора, находящегося под перегрузкой, с частотой вращения, которая присуща магнитному полю статора, для различных типов мотора последующее:
- равное для агрегатов синхронного типа;
- неравное для асинхронных движков (наблюдается неизменное отставание от скорости вращения магнитного поля статора, равное величине скольжения).
На базе осознания того, чем различается асинхронный движок от синхронного, можно сконструировать главные достоинства и недочеты этих движков.
Сопоставление различных типов движков
Движки синхронной разновидности труднее в использовании, так как они:
- в отличие от асинхронных моделей нуждаются в доп источнике неизменного тока;
- подвержены наиболее резвому износу деталей (из-за использования контактных колец со щетками);
- требуют внедрения вспомогательных устройств для пуска (индукционный движок имеет свой пусковой момент).
Для асинхронных моделей свойственны:
- простота конструкции;
- надежность в эксплуатации.
При всем этом синхронные движки владеют наиболее широкими способностями исходя из убеждений коэффициента мощности, также наименее чувствительны к перепадам напряжения, но стоимость таковых агрегатов выше, что делает их внедрение наименее прибыльным.
Источник: www.szemo.ru
Синхронный и асинхронный движок: отличия, механизм работы, применение
Систематизация движков основывается на различных параметрах. По одному из их, различают синхронный и асинхронный движок. Отличия устройств, общая черта и механизм работы описаны в статье.
Синхронный движок
Этот тип мотора способен работать сразу и в качестве генератора, и как, фактически, движок. Его устройство сродни синхронному генератору. Соответствующей индивидуальностью мотора является неизменяемая частота роторного вращения от перегрузки.
Эти виды движков обширно используются в почти всех сферах, к примеру, для электронных проводов, которым нужна неизменная скорость.
Механизм работы синхронного мотора
В базу его функционирования положено взаимодействие вращающегося магнитного поля якоря и магнитных полей индукторных полюсов. Обычно якорь находится в статоре, а индуктор распологается в роторе. Для массивных моторов употребляются электронные магниты для полюсов, а для слабеньких — неизменные.
Механизм работы синхронного мотора содержит в себе (краткосрочно) и асинхронный режим, который обычно используют для разгона до нужной (другими словами номинальной) скорости вращения. В это время индукторные обмотки замыкаются накоротко либо средством реостата. Опосля заслуги нужной скорости индуктор начинают питать неизменным током.
Достоинства и недочеты
Главными минусами этого вида мотора являются:
- необходимость питания обмотки неизменным током;
- сложность пуска;
- скользящий контакт.
Большая часть генераторов, где бы они ни использовались, являются синхронными. Преимуществами таковых движков в целом являются:
Асинхронный движок
Данный вид устройста представляет механизм, направленный на трансформацию электронной энергии переменного тока в механическую. Из самого наименования «асинхронный» можно прийти к выводу, что идет речь о неодновременном процессе. И вправду, частота вращения магнитного поля статора тут выше роторной постоянно.
Такое устройство состоит из статора цилиндрической формы и ротора, зависимо от вида которого асинхронные движки короткозамкнутые могут быть и с фазным ротором.
Принцип деяния
Работа мотора осуществляется на базе взаимодействия магнитного статорного поля и наводящихся сиим же полем токов в роторе. Крутящий момент возникает тогда, когда имеется разность частоты вращения полей.
Резюмируем сейчас, чем различается синхронный движок от асинхронного. Чем разъясняется обширное применение 1-го типа и ограниченное — другого?
Синхронный и асинхронный движок: отличия
Отличие работы движков – в роторе. У синхронного типа он заключается в неизменном либо электронном магните. Благодаря притягиванию разноименных полюсов крутящееся поле статора тянет и магнитный ротор. Их скорость выходит схожей. Отсюда и заглавие — синхронный.

Асинхронные движки, в свою очередь, ординарны и надежны, но их недочетом является трудность регулировки частоты вращения. Для реверсирования трехфазного асинхронного мотора (другими словами конфигурации направления его вращения в обратную сторону) меняют размещение 2-ух фаз либо 2-ух линейных проводов, приближающихся к обмотке статора.
Если разглядывать частоту вращения, то имеют и тут синхронный и асинхронный движок отличия. В синхронном типе этот показатель является неизменным, в отличие от асинхронного. Потому 1-ый употребляют там, где нужна неизменная скорость и полная маневренность, к примеру, в насосах, вентиляторах и компрессорах.
Выявить на том либо ином устройстве наличие рассматриваемых типов устройств весьма просто. На асинхронном движке будет не круглое число оборотов (к примеру, девятьсот 30 за минуту), в то время как на синхронном — круглое (к примеру, тыща оборотов за минуту).
И те, и остальные моторы управляются довольно трудно. Синхронный тип имеет твердую характеристику механики: при хоть какой меняющейся перегрузке на вал мотора частота вращения будет одной и той же. При всем этом перегрузка, естественно, обязана изменяться с учетом того, чтоб движок способен ее выдержать, по другому это приведет к поломке механизма.

Так устроен синхронный и асинхронный движок. Отличия обоих видов обуславливают сферу их использования, когда один вид совладевает с задачей хорошим образом, для другого это будет проблематическим. В то же время можно повстречать и комбинированные механизмы.
Источник: fb.ru
Чем различается синхронный движок от асинхронного?

В асинхронном движке ротор движется «сам по для себя». В нем вначале нет ни магнитного поля, на него не подается никакого электронного напряжения. Он даже не должен быть изготовленным из железа — магнитного сплава. Ну а вот, поди ж ты, стоит подключить к движку трехфазное напряжение, и ротор завертелся. Безо всякого подталкивания. Но по-своему.
Два вида электродвигателей переменного тока
Асинхронные движки — доверчивая простота
Ротор то догоняет волну, то слегка отстает, поэтому что синхронно с ней бежать просто не может. Такое явление окрестили «скольжением», догнав бегущее магнитное поле, ротор с беличьей клеточкой теряет магнитную индукцию и далее некое время просто скользит по инерции. А когда трение либо перегрузка вынуждают его отстать от бегущего поля, он снова «ощутит» внутри себя конфигурации силовых линий обгоняющего его поля и опять обретет индукцию, а вкупе с сиим и силы двигаться.

Другими словами, ротор слегка проскальзывает: то догоняет бегущее умеренно по кругу магнитное поле, то «запамятывает, для чего бежал» и слегка приотстает, то опять «спохватывается» и снова стремится догнать. Равномерно эти отличия стабилизируются — зависимо от трения в подшипниках и величины перегрузки на вал — и асинхронный движок начинает работать просто со скоростью вращения, чуток наименьшей частоты напряжения на статоре. Эта разница частот и именуется частотой скольжения.
Движки синхронные: сложное в ординарном
Для того, чтоб ротор был связан с бегущей волной магнитного поля катушек статора твердым образом, выдумали электродвигатель синхронный. А неувязка решается просто. В роторе заместо изменяющегося магнитного поля от короткозамкнутых токов беличьей клеточки необходимо применять неизменные магниты и их магнитное поле.

Вариантов два. Либо это поле от неизменного магнита, закрепленного в роторе, либо это поле от электромагнитов, установленных в роторе заместо такового магнита.
Обыденный магнит, естественно, проще. Но тогда для обычного функционирования таковых электромоторов необходимо, чтоб на их на всех — а употребляются тыщи электромоторов — магниты были строго схожи. По другому характеристики движения будут различными, а магниты еще имеют свойство размагничиваться.
Электромагнит, установленный в роторе мотора, легче вынудить производить поле подходящего свойства, но требуется электронный ток для его работы. Таковой ток, который именуется током возбуждения, в свою очередь необходимо кое-где брать и как-то на ротор подавать.

1 – ротор,
2 – коллектор возбуждения
Отсюда и происходит некое обилие конструкций синхронных движков. Но важнее всего то, что синхронные движки крутят собственный вал строго синхронно частоте бегающего по кругу поля катушек статора, другими словами скорость их вращения буквально равна — либо кратна (если обмоток статора больше 3-х) — частоте переменного тока в питающей сети.
Но не считая всего остального, синхронный движок владеет свойством полной обратимости. Поэтому что синхронный электродвигатель — это этот же самый генератор электронного тока, но работающий «в оборотную сторону». В генераторе некая механическая сила вращает вал с ротором, и от этого в обмотках статора возникает наведенное электронное напряжение от вращающегося магнитного поля ротора. А отличие синхронного мотора от генератора в том, что напряжение в катушках статора порождает бегающее по кругу магнитное поле, которое, взаимодействуя с неизменным магнитным полем ротора, толкает его, чтоб ротор тоже вращался.
Лишь если в генераторе вращению ротора можно механически придать всякую скорость, и от этого будет изменяться частота переменного тока, им генерируемого, то в синхронном движке таковой роскоши нет. Синхронный движок вращается со скоростью конфигурации напряжения в сети, а оно у нас выдерживается строго в 50 герц.
Отличия и недочеты этих движков
Отличия синхронного и асинхронного движков ясны из их заглавий. Фактически, плюсы имеют и тот, и иной вариант конструкции. Ниже перечислены плюсы, которыми различаются оба мотора — синхронный и асинхронный.

Асинхронный движок различается от синхронного последующими параметрами:
- простота конструкции и низкая стоимость;
- нет скользящих контактов, надежность в эксплуатации;
- напряжение прикладывается к недвижным катушкам статора;
- ротор весьма прост по конструкции;
- при запуске и разгоне равномерно увеличивает мощность;
- возможность реверсировать направление вращения, просто поменяв местами две питающих фазы;
- при остановке движения (очень большая механическая перегрузка на вал ротора) никакой трагедии не происходит, может произойти перегрев беличьей клеточки.
Отличия синхронного мотора от асинхронного заключаются в последующем:
- размеренная скорость вращения вне зависимости от перегрузки на вал;
- низкая чувствительность к перепадам напряжения в сети;
- при уменьшении механической перегрузки способен по инерции работать как генератор, не забирая энергию, а отдавая ее в сеть;
- высочайший КПД;
- способен восполнить реактивную мощность сети.
Но у всякого имеются и присущие лишь ему недочеты.
Асинхронный имеет последующие отрицательные черты:
- трудность регулировки частоты вращения;
- низкая частота вращения;
- зависимость отставания частоты вращения от перегрузки на ось;
- при работе ротор греется за счет короткозамкнутых токов — требуется доп остывание.
Недочеты синхронного мотора:
- труднее по конструкции;
- в неких системах для проводки тока возбуждения в обмотки ротора употребляется коллектор, как в движке неизменного тока;
- сложнее запускается.


Невзирая на различия, оба электронных мотора отыскали для себя применение в технике и употребляются в самых различных исполнениях и размерах.
Источник: domelectrik.ru
Чем асинхронные движки различаются от синхронных
В данной статье разглядим принципные отличия синхронных электродвигателей от асинхронных, чтоб любой читающий эти строчки мог бы эти различия верно осознавать.
Асинхронные электродвигатели наиболее обширно всераспространены сейчас, но в неких ситуациях синхронные движки оказываются наиболее пригодными, наиболее действенными для решения определенных промышленных и производственных задач, о этом будет поведано дальше.
До этого всего давайте вспомним, что все-таки совершенно такое электродвигатель. Электродвигателем именуется электронная машинка, созданная для преобразования электронной энергии в механическую энергию вращения ротора, и служащая в качестве привода для какого-либо механизма, к примеру для приведения в действие подъемного крана либо насоса.
Еще в школе всем ведали и демонстрировали, как два магнита отталкиваются одноименными полюсами, а разноименными — притягиваются. Это неизменные магниты. Но есть и переменные магниты. Любой помнит набросок с проводящей рамкой, расположенной меж полюсами подковообразного неизменного магнита.
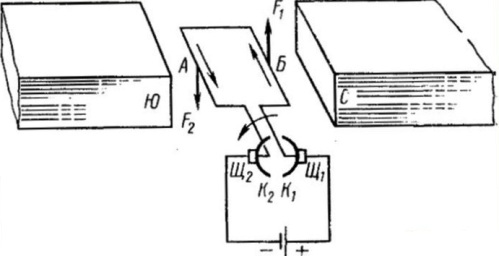
Горизонтально расположенная рамка, если по ней пустить неизменный ток, станет поворачиваться в магнитном поле неизменного магнита под действием пары сил (Сила Ампера), пока не будет достигнуто равновесие в вертикальном положении.
Если потом по рамке пустить неизменный ток обратного направления, то рамка оборотится далее. В итоге такового попеременного питания рамки неизменным током то 1-го, то другого направления, достигается непрерывное вращение рамки. Рамка тут представляет собой аналог переменного магнита.
Приведенный пример с вращающейся рамкой в простейшей форме показывает механизм работы синхронного электродвигателя. У хоть какого синхронного электродвигателя на роторе есть обмотки возбуждения, на которые подается неизменный ток, формирующий магнитное поле ротора. Статор же синхронного электродвигателя содержит обмотку статора, для формирования магнитного поля статора.
При подаче на обмотку статора переменного тока, ротор придет во вращение с частотой, соответственной частоте тока в обмотке статора. Частота вращения ротора будет синхронна частоте тока обмотки статора, потому таковой электродвигатель именуется синхронным. Магнитное поле ротора создается током, а не индуцируется полем статора, потому синхронный движок способен держать синхронные номинальные обороты независимо от мощности перегрузки, очевидно, в разумных границах.
Асинхронный электродвигатель в свою очередь различается от синхронного. Если вспомянуть набросок в рамкой, и рамку просто накоротко замкнуть, то при вращении магнита вокруг рамки, индуцируемый в рамке ток создаст магнитное поле рамки, и рамка будет стремиться догнать магнит.
Частота вращения рамки под механической перегрузкой будет постоянно меньше частоты вращения магнита, и частота не будет потому синхронной. Этот обычный пример показывает принцип деяния асинхронного электродвигателя.
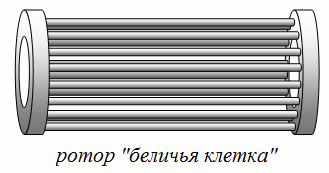
В асинхронном электродвигателе крутящееся магнитное поле формируется переменным током обмотки статора, расположенной в его пазах. Ротор обычного асинхронного мотора обмоток как таких не имеет, заместо этого на нем размещены накоротко соединенные стержни (ротор типа «беличья клеточка»), таковой ротор именуется короткозамкнутым ротором. Бывают еще асинхронные движки с фазным ротором, там ротор содержит обмотки, сопротивление и ток в каких можно регулировать реостатом.
Итак, в чем все-таки принципное отличие асинхронного электродвигателя от синхронного? На вид снаружи они похожи, иногда даже спец не отличит по наружным признакам синхронный электродвигатель от асинхронного. Основное же отличие заключается в устройстве роторов. Ротор асинхронного электродвигателя не питается током, а полюса на нем индуцирутся магнитным полем статора.
Ротор синхронного мотора имеет обмотку возбуждения с независящим питанием. Статоры синхронного и асинхронного мотора устроены идиентично, функция в любом случае одна и та же — создание вращающегося магнитного поля статора.
Обороты асинхронного мотора под перегрузкой постоянно на величину скольжения отстают от вращения магнитного поля статора, в то время как обороты синхронного мотора равны по частоте «оборотам» магнитного поля статора, потому если обороты должны быть неизменными при разных отягощениях, предпочтительней выбирать синхронный движок, к примеру в приводе гильотинных ножниц идеальнее всего управится со собственной задачей мощнейший синхронный движок.

Область внедрения асинхронных движков сейчас весьма широка. Это различные станки, транспортеры, вентиляторы, насосы, – все то оборудование, где перегрузка сравнимо размеренна, либо понижение оборотов под перегрузкой не критично для рабочего процесса.
Некие компрессоры и насосы требуют неизменной частоты вращения при хоть какой перегрузке, на такое оборудование ставят синхронные электродвигатели.
Синхронные движки дороже в производстве, чем асинхронные, потому если есть возможность выбора и маленькое понижение оборотов под перегрузкой не критично, получают асинхронный движок.
Синхронные электродвигатели обширно используются в электроприводах, не требующих регулирования частоты вращения. По сопоставлению с асинхронными движками они имеют ряд преимуществ:
наиболее высочайший коэффициент полезного деяния;
возможность производства движков с низкой частотой вращения, что дозволяет отрешиться от промежных передач меж движком и рабочей машинкой;
частота вращения мотора не зависит от перегрузки па его валу;
возможность использования в качестве компенсирующих устройств реактивной мощности.
Синхронные электродвигатели могут являться пользователями и генераторами реактивной мощности. Нрав и значение реактивной мощности синхронного мотора зависят от величины тока в обмотке возбуждения. Зависимость тока в обмотке, выдающей напряжение в электронную сеть, от тока возбуждения носит заглавие U-образной свойства синхронного мотора. При 100%-ной перегрузке на валу мотора его косинус фи равен 1. При всем этом электродвигатель не потребляет реактивной мощности из электронной сети. Ток в обмотке статора при всем этом имеет малое значение.
Источник: electricalschool.info
Чем различается синхронный движок от асинхронного
На нынешний денек асинхронные электродвигатели наиболее всераспространены, но они не всепригодны. В неких ситуациях их внедрение недозволено считать действенным решением производственных задач. В таковых ситуациях промышленное применение синхронных движков считается наиболее оправданным. В чем все-таки разница меж синхронными и асинхронными движками?
.jpg)
Под электродвигателем в целом понимается электронная машинка, модифицирующая электронную энергию в механическую с помощью ротора. Такое устройство применяется в разных промышленных механизмах.
Ключевое отличие синхронного и асинхронного движков заключается в механизме работы. Синхронный движок состоит из ротора и стартера. На роторе имеется обмотка возбуждения, на которую подается неизменный ток. Таковым образом, формируется магнитное поле ротора. На стартере, в свою очередь, также имеется обмотка, формирующая свое магнитное поле лишь уже средством подачи переменного тока. Частота вращения ротора синхронна частоте подаче тока, отсюда и заглавие мотора. Соответствующей индивидуальностью синхронного электродвигателя является способность поддерживать номинальные обороты вне зависимости от мощности перегрузки.
Асинхронный электродвигатель работает по иному принципу. На роторе такового механизма обмотка отсутствует. Заместо нее находятся соединенные стержни. Ротор такового плана именуется «беличья клеточка». Он не питается током, а полюса на нем индуцируются магнитным полем статора. Под воздействием механической перегрузки частота вращения рамки меньше частоты вращения магнита, другими словами частоты не синхронны.
Следует учесть, что отличить синхронный движок от асинхронного по наружным признакам нереально. Статоры этих устройств устроены идиентично. Не считая того, функция этих типов электродвигателей одна и та же — создание вращающегося магнитного поля статора. Единственное значимое отличие асинхронного и синхронного движков – устройство ротора.
Выбирая меж синхронным и асинхронным электродвигателем нужно отталкиваться от производственных задач. В вариантах, когда для работы требуется поддержание неизменных оборотов при разных отягощениях лучше применять синхронные движки. Например, в строй кранах либо гильотинных ножницах. Нужно сказать, что асинхронные движки в индустрии всераспространены еще больше. Ими обустроены различные станки, транспортеры, вентиляторы, насосы, словом, хоть какое оборудование со размеренной перегрузкой. В их работе понижение оборотов при завышенной перегрузке не является критическим отклонением.
Принципиальное отличие синхронных движков – накладность. Создание таковых устройств имеет наиболее высшую стоимость, потому приобретение и предстоящее сервис также востребует огромных вложений.
Выводы:
- Асинхронный и синхронный движки различаются механизмом работы.
- В синхронном движке частота вращения ротора соответствует частоте подаче тока.
- Синхронный движок может поддерживать номинальные обороты при хоть какой перегрузке, асинхронный – нет.
- Асинхронные движки в индустрии всераспространены еще больше, чем синхронные.
- Синхронные движки дороже, чем асинхронные.
Источник: thedb.ru