Позиция шагового двигателя калина
Lada 2114 Бандитка › Logbook › Нужная информация для диагностики дефектов

Понятно что инфа взята из веба, но так же скинул себе. Может кому еще понадобится
Узел дроссельной заслонки
На 1-ый взор, узел дроссельной заслонки представляет собой несложное механическое устройство. На нем размещается датчик положения дроссельной заслонки и шаговый мотор (регулятор ХХ). В комплексе этот узел должен соответствовать серьезным техническим условиям. Отклонение черт узла дроссельной заслонки от этих ТУ значительно влияет на поведение двигателя в переходных режимах: разгон, торможение, движение накатом, работа на режиме холостого хода, пуск двигателя. Исправность датчика положения дроссельной заслонки и шагового двигателя не гарантируют правильную работу системы при плохом выполнении механики и конструкции дроссельной заслонки. Узел дроссельной заслонки является в системе устройством, через которое шофер задает требуемую скорость движения кара. Нажимая на педаль дроссельной заслонки (газа), он изменяет пропускную способность впускного коллектора для подачи воздуха в движок. 2-ая задачка дроссельного узла заключается в поддержании байпасного канала (канал ХХ) в таком режиме, чтоб при отказе водителя от управления дросселем (выключение КПП (Контрольно-пропускной пункт — пункт, предназначенный для контроля за проходом (посещением) и пропуска на территорию какого-либо объекта), торможение, движение накатом — во всех этих вариантах дроссельная заслонка закрыта) этот канал обеспечивал нужное {наполнение} двигателя воздухом для поддержания данных системой оборотов вращения коленчатого вала. Этот режим реализуется при помощи шагового мотора, установленного в узле дроссельной заслонки. Плохое выполнение узла дроссельной заслонки (несоответствие ТУ), обычно, вызывает последующие неисправности в работе:
• Неспешное понижение оборотов двигателя опосля закрытия дроссельной заслонки.
• Затруднённый запуск жаркого двигателя с закрытым дросселем.
• Движок глохнет при резком понижении перегрузки (выключение КПП (Контрольно-пропускной пункт — пункт, предназначенный для контроля за проходом (посещением) и пропуска на территорию какого-либо объекта), движение накатом).
Перечисленные неисправности могут быть вызваны и иными причинами, к примеру, сбоями в системе зажигания, топливоподачи, неисправностью датчика расхода воздуха. Но эти неисправности, если они есть, появляются и на остальных режимах работы двигателя.
Датчик положения дроссельной заслонки (ДПДЗ)
ДПДЗ размещается на узле дроссельной заслонки и описывает степень открытия дроссельной заслонки. Система употребляет показания датчика дроссельной заслонки для последующих режимов работы:
1. На режиме запуска двигателя подача горючего корректируется по степени открытия дросселя (возрастает при открытом дросселе). Но при открытии дросселя наиболее 90% система перестает подавать горючее в движок. В этом режиме можно воплотить продувку двигателя при прокрутке стартером.
2. Во время движения кара, при показаниях датчика дроссельной заслонки выше определенного значения, система с учетом оборотов двигателя обеспечивает мощностной режим топливоподачи. Расчет времени открытия форсунки зависимо от расхода воздуха определяется параметром обогащения состава топливно-воздушной консистенции по таблицам, зашитым в памяти блока управления. В запасных режимах, при выходе из строя датчика массового расхода показания датчика дроссельной заслонки определяют {наполнение} цилиндров воздухом для расчета топливоподачи в движок и установки угла опережения зажигания.
3. В рабочих режимах положение дроссельной заслонки 0% значит выход на режим холостого хода. В этом случае задачка системы — поддерживать данный уровень частоты вращения коленчатого вала зависимо от показаний датчика температуры и скорости кара. Блок управления пробует понизить обороты двигателя, управляя режимом блокировки топливоподачи до границы, с которой врубается программный регулятор холостого хода, обеспечивающий при помощи шагового мотора и угла опережения зажигания размеренную работу двигателя на данных оборотах.
Необходимо осознавать, что система пользуется показаниями датчика положения дросселя не только лишь для определения режима работы (холостой ход, мощностной режим, продувка двигателя при запуске, работа в запасных режимах), да и проводит корректировку подачи горючего в движок зависимо от скорости конфигурации положения дроссельной заслонки (в аналогии с карбюратором — ускорительный насос). Ресурс работы датчиков русских производителей оставляет желать наилучшего. Стирание резистивного слоя на внутренних контактах датчика может приводить к ряду сбоев в работе системы. Переход на бесконтактный датчик поможет выправить ситуацию. Обычно, показания датчика нарушаются в положениях, где он почаще всего и работает — это нулевое (либо близкое к нему) положение дроссельной заслонки.
Соответствующие сбои в работе системы при неисправном датчике дроссельной заслонки:
• Зависание оборотов холостого хода на уровне 1500-3000 зависимо от температуры двигателя (Это запасный режим работы системы, он вызван неисправностью датчика, система в этом случае не регулирует обороты холостого хода).
• Резкие рывки при наборе скорости. Вызываются резкими провалами в показаниях положения дроссельной заслонки.
Неисправность датчика положения дроссельной заслонки довольно отлично определяется системой самодиагностики блока управления. При нехорошем датчике зажигается лампа «Проверь движок» и в память блока заносится соответственный код неисправности. Когда возникает таковой код неисправности, а вы не увидели сбоев в работе системы, проверьте крепление датчика и его разъем. И будьте готовы к подмене датчика через некое время. Если при наличии перечисленных дефектов система самодиагностики не выдает кода неисправности по датчику дроссельной заслонки, не спешите его поменять. Признаки, вышеперечисленные, быстрее всего, вызваны иными причинами.
Регулятор холостого хода (РХХ)
Шаговый мотор установлен в байпасном канале узла дроссельной заслонки. Положение вала шагового мотора описывает проходное сечение байпасного канала, нужное для устойчивой работы двигателя при закрытой дроссельной заслонке. В системе управления шаговый мотор делает несколько главных функций:
• Система выслеживает при помощи шагового мотора такое сечение байпасного канала (зависимо от оборотов двигателя, скорости кара и положения дроссельной заслонки) при котором в случае сброса перегрузки обязано быть обеспечено плавное понижение оборотов коленчатого вала до данных оборотов холостого хода. Прогрев двигателя опосля пуска. Система описывает термическое состояние двигателя по датчику температуры охлаждающей воды и автоматом устанавливает обороты холостого хода (малые обороты при закрытой дроссельной заслонке). При помощи шагового мотора в этом случае задается такое сечение байпасного канала, при котором движок способен поддерживать эти обороты.
• При открытии дроссельной заслонки весь воздух в движок поступает через сечение дроссельной заслонки, а байпасный канал должен быть подготовлен к резкому закрытию дросселя и сбросу перегрузки (отключение КПП (Контрольно-пропускной пункт — пункт, предназначенный для контроля за проходом (посещением) и пропуска на территорию какого-либо объекта)).
• Третьей функцией шагового мотора является компенсация контролируемой блоком управления перегрузки (включение/выключение вентилятора, кондюка и т.д.). В режиме холостого хода система изменяет положение шагового мотора до включения/выключения перегрузки. Тем возмещается мощность, подключаемой данной перегрузки (компенсирует провал оборотов в режиме холостого хода).
Шаговый мотор и именуют регулятором холостого хода, но он делает только перечисленные функции. Данные обороты холостого хода в границах ?50 о/мин поддерживаются в главном резвым контуром управления — регулятором по углу опережения зажигания. Раскачка оборотов в режиме холостого хода зависит конкретно от этого контура и воздействия возмущений в системе топливоподачи. Шаговый мотор описывает неспешную составляющую в регулировании, отслеживая режимные переходы системы управления.
Выход из строя шагового двигателя приводит к очевидным сбоям в системе: невозможность работы двигателя на холостом ходу, увеличение оборотов ХХ, увеличивающихся по мере прогрева двигателя. Эти неисправности появляются и при проблемах в цепях управления шаговым мотором и могут быть определены с помощью тестера ДСТ-2М, который дозволяет задавать положение шагового мотора как параметр блока управления. Выбрав режим управления исполнительными механизмами в тестере, необходимо подвигать шаговый мотор при помощи блока управления в ту либо иную сторону. Если при всем этом обороты двигателя не меняются, расход воздуха остается неизменным, а система описывает неизменное положение шагового мотора, неисправность шагового мотора либо цепей его управления явна. Проверка шагового мотора при помощи тестера может и не отдать результата. Система будет верно отрабатывать ваши пробы закрыть либо открыть байпасный канал. Но при всем этом при эксплуатации кара останутся: зависания оборотов при выключении КПП (Контрольно-пропускной пункт — пункт, предназначенный для контроля за проходом (посещением) и пропуска на территорию какого-либо объекта) и заглохания двигателя при движении накатом и невозможность пуска двигателя без помощи дроссельной заслонки. Возникновение в комплексе этих дефектов гласит о неисправности шагового двигателя либо его цепей управления. И даже при исправных цепях, шаговый мотор может просто некорректно делать команды системы управления. Заместо движения вперед отрабатывает движение вспять либо напротив. Это можно следить, если снять шаговый мотор и особым тестером задавать ему движения в различные стороны. Метод управления шагового мотора довольно сложен, и сбои в его работе могут быть выявлены лишь особым тестером, к примеру, ДСТ-6C. Блок управления может выдавать код неисправности шагового мотора, но не постоянно это значит, что шаговый мотор либо цепи его управления вправду вышли из строя. К огорчению, этот код может показаться и при исправном шаговом моторе. До этого чем разбираться с шаговым мотором, удостоверьтесь, что данные обороты холостого хода в системе выставляются верно по температуре двигателя и режим холостого хода определен в системе (положение дроссельной заслонки 0%).
Совет: Если смазывать механическую часть шагового мотора литолом, то он работает существенно лучше и подольше. Опосля смазки нехороший шаговый мотор нередко восстанавливает свою работоспособность.
Источник: www.drive2.com
Датчик холостого хода. Шаговый мотор (регулятор ХХ)
 Шаговый мотор установлен в байпасном канале узла дроссельной заслонки. Положение вала шагового мотора описывает проходное сечение байпасного канала, нужное
Шаговый мотор установлен в байпасном канале узла дроссельной заслонки. Положение вала шагового мотора описывает проходное сечение байпасного канала, нужное
— для устойчивой работы двигателя при закрытой дроссельной заслонке.
В системе управления шаговый мотор делает несколько главных функций:
• Прогрев двигателя опосля пуска. Система описывает термическое состояние двигателя по датчику температуры охлаждающей воды и автоматом устанавливает обороты холостого хода (малые обороты при закрытой дроссельной заслонке). При помощи шагового мотора в этом случае задается такое сечение байпасного канала, при котором движок способен поддерживать эти обороты.
• При открытии дроссельной заслонки весь воздух в движок поступает через сечение дроссельной заслонки, а байпасный канал должен быть подготовлен к резкому закрытию дросселя и сбросу перегрузки (отключение КПП (Контрольно-пропускной пункт — пункт, предназначенный для контроля за проходом (посещением) и пропуска на территорию какого-либо объекта)). Система выслеживает при помощи шагового мотора такое сечение байпасного канала (зависимо от оборотов двигателя, скорости кара и положения дроссельной заслонки) при котором в случае сброса перегрузки обязано быть обеспечено плавное понижение оборотов коленчатого вала до данных оборотов холостого хода.
• Третьей функцией шагового мотора является компенсация контролируемой блоком управления перегрузки (включение/выключение вентилятора, кондюка и т.д.). В режиме холостого хода система изменяет положение шагового мотора до включения/выключения перегрузки. Тем возмещается мощность, подключаемой данной перегрузки (компенсирует провал оборотов в режиме холостого хода).
Шаговый мотор и именуют регулятором холостого хода, но он делает только перечисленные функции. Данные обороты холостого хода в границах 50 о/мин поддерживаются в главном резвым контуром управления — регулятором по углу опережения зажигания. Раскачка оборотов в режиме холостого хода зависит конкретно от этого контура и воздействия возмущений в системе топливоподачи. Шаговый мотор описывает неспешную составляющую в регулировании, отслеживая режимные переходы системы управления.
Выход из строя шагового двигателя приводит к очевидным сбоям в системе: невозможность работы двигателя на холостом ходу, увеличение оборотов ХХ, увеличивающихся по мере прогрева двигателя. Эти неисправности появляются и при проблемах в цепях управления шаговым мотором и могут быть определены с помощью тестера ДСТ-2М, который дозволяет задавать положение шагового мотора как параметр блока управления.
Выбрав режим управления исполнительными механизмами в тестере, необходимо подвигать шаговый мотор при помощи блока управления в ту либо иную сторону. Если при всем этом обороты двигателя не меняются, расход воздуха остается неизменным, а система описывает неизменное положение шагового мотора, неисправность шагового мотора либо цепей его управления явна.
Проверка шагового мотора при помощи тестера может и не отдать результата. Система будет верно отрабатывать ваши пробы закрыть либо открыть байпасный канал. Но при всем этом при эксплуатации кара останутся зависания оборотов при выключении КПП (Контрольно-пропускной пункт — пункт, предназначенный для контроля за проходом (посещением) и пропуска на территорию какого-либо объекта) и заглохания двигателя при движении накатом и невозможность пуска двигателя без помощи дроссельной заслонки. Возникновение в комплексе этих дефектов гласит о неисправности шагового двигателя либо его цепей управления. И даже при исправных цепях, шаговый мотор может просто некорректно делать команды системы управления. Заместо движения вперед отрабатывает движение вспять либо напротив. Это можно следить, если снять шаговый мотор и особым тестером задавать ему движения в различные стороны. Метод управления шагового мотора довольно сложен, и сбои в его работе могут быть выявлены лишь особым тестером, к примеру, ДСТ-6С.
Блок управления может выдавать код неисправности шагового мотора, но не постоянно это значит, что шаговый мотор либо цепи его управления вправду вышли из строя. К огорчению, этот код может показаться и при исправном шаговом моторе.
До этого чем разбираться с шаговым мотором, удостоверьтесь, что данные обороты холостого хода в системе выставляются верно по температуре двигателя и режим холостого хода определен в системе (положение дроссельной заслонки 0%).
Совет: Если смазывать механическую часть шагового мотора литолом, то он работает существенно лучше и подольше. Опосля смазки нехороший шаговый мотор нередко восстанавливает свою работоспособность.
Источник: autoruk.ru
Самостоятельная диагностика (процесс установления диагноза, то есть заключения о сущности болезни и состоянии пациента) ошибок блока управления движком Лада Калина
Почти все считают, что диагностика (процесс установления диагноза, то есть заключения о сущности болезни и состоянии пациента) системы управления инжекторным движком – удел высококвалифицированных профессионалов. Меж тем в любом современном контроллере (ЭБУ — электрический блок управления) имеется довольно мощная интегрированная система самодиагностики (реализованная на программно–аппаратном уровне), что существенно упрощает поиск вероятных дефектов даже непрофессионалу.
ЭБУ представляет собой собственного рода мини-компьютер, созданный для решения специализированных задач в настоящем времени. Это задачки можно разбить на последующие группы: обработка сигналов от датчиков, расчет управляющих действий по данным методам, управление исполнительными механизмами.
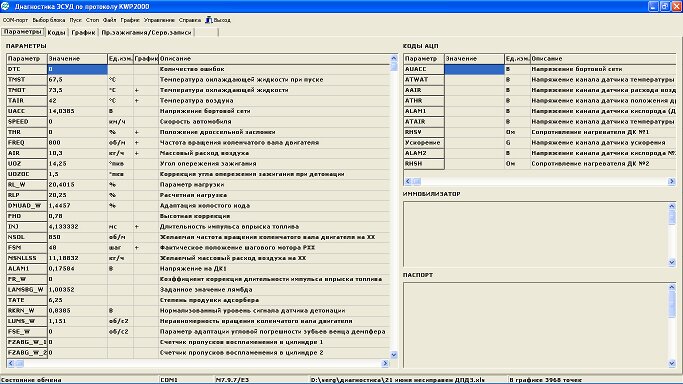
Объединиться с контроллером кара для чтения исследовательских данных можно с помощью диагностического тестера (раздельно приобретаемый устройство) либо компа с установленной специальной программкой. В данной статье будет рассмотрена диагностика (процесс установления диагноза, то есть заключения о сущности болезни и состоянии пациента) ЭБУ Bosh M7.9.7 (установленного на «Калине» создателя; диагностика (процесс установления диагноза, то есть заключения о сущности болезни и состоянии пациента) контроллеров наиболее поздних версий производися аналогично) с помощью безвозмездно распостраняемой программки KWP_D, скачать которую можно в Сети.
Не считая программки, нужно приобрести так именуемый диангостический адаптер К-линии (VAG-COM USB KKL адаптер), поддерживающий протокол KWP2000 (также узнаваемый как OBD-II) — адаптер предназначен для передачи данных с кара в USB-порт компа. Протокол KWP2000, также узнаваемый как OBD-II, и отдал заглавие разъему диагностики, который размещен под крышкой рядом с рычагом КПП (Контрольно-пропускной пункт — пункт, предназначенный для контроля за проходом (посещением) и пропуска на территорию какого-либо объекта), и к которому необходимо будет подключить адаптер. Из всего модельного ряда АвтоВАЗа, лишь в «Ладе Калине» он размещен так комфортно. Остальным автовладельцам приходится помучаться с его подключением.


Опосля установки драйвера из набора идущего с адаптером ПО (то есть программное обеспечение – комплект программ для компьютеров и вычислительных устройств), в системе покажется СОМ–порт, номер которого нужно переопределить на 1-4 (1, 2, 3 либо 4 — конкретно с этими номерами портов работает KWP_D). Подключаем разъем диагностики, включаем зажигание и запускаем программку. Опосля недолговременной паузы система выдает сообщение, что связь установлена – можно приступать к диагностике.
Любой движок имеет так именуемые типовые характеристики – базисные технические свойства, описывающие нормальную работу двигателя, которые и берутся для сопоставления с измеренными в процессе диагностики значениями. Если провести аналогию – это, к примеру, температура тела здорового человека (типовой параметр 36.6 °C). Ниже будет рассмотрена последовательность диагностики на примере восьмиклапанного двигателя объемом 1.6 л.. Все измерения будем проводить на заведенном движке в режиме холостого хода.
1-ое, на что следует направить внимание – параметр DTC (наличие сохраненных ошибок):
Если ошибки есть, перебегаем на вкладку «Коды» и смотрим номер ошибки совместно с расшифровкой. Различные коды ошибок и пояснения к ним просто отыскать в Вебе. Если ошибок нет, это еще не значит, что с движком все в порядке. К примеру, при завышенных оборотах холостого хода ЭБУ может принимать сигнал с неисправного датчика ДПДЗ (датчик положения дроссельной заслонки) как нажатую водителем педаль акселератора, и не выдавать при всем этом никакой ошибки.
Принято считать, что если измеренные характеристики не различаются от типовых наиболее, чем на 20%, можно прийти к выводу, что с каром все в порядке.
Вернемся к типовым характеристикам. Более принципиальных из их не так много:
UACC – напряжение аккумуляторной батареи — 13.9В – 14.5В. Для проверки нужно включить все массивные пользователи энергии (далекий свет, подогрев заднего стекла, обогрев сидений и так дальше). Наименьшее напряжение показывает на необходимость отдельной проверки цепей электрики.
THR – положение дроссельной заслонки. На холостом ходу 0%. За этот параметр отвечает датчик положения дроссельной заслонки. Обычно на его неисправность указывают «рывки и провалы» при движении, также увеличенные обороты холостого хода. Проверяем этот параметр на незаведенном движке (но с включенным зажиганием). Плавненько жмем на педаль акселератора, следя за показаниями положения, которые должны также плавненько расти до 85–90%. А почему не 100? Поэтому что 90. Так заложено производителями. Если все соответствует – датчик исправен.
FREQ – частота вращения коленвала. Будет изменяться от 800 до 840 о/мин. Сигнал снимается с датчика положения коленвала (ДПКВ). Если движок завелся, означает этот датчик исправен. Он единственный, с неисправностью которого пуск двигателя неосуществим.
AIR – массовый расход воздуха. Обычно от 10 до 12 кг/час на холостом ходу. Берется с самого головного датчика – массового расхода воздуха (ДМРВ). К огорчению, его настоящая проверка без соответственного оборудования невозможна. Хотя в автосервисах весьма обожают с принципиальным видом замерить напряжение на датчике обыденным мультиметром и здесь же вынести вердикт, основывая свое решение на расхождении в сотые толики вольта (и здесь же предложат приобрести у их новейший за 2500–3500 рублей). Потому поступаем просто. Надавливаем ногой на педаль акселератора, чтоб обороты подпрыгнули до 4000–5000 о/мин. Расход воздуха также должен резко вырасти до 200–250 кг/ч, и исправный датчик эти числа должен Для вас выдать.
UOZ – угол опережения зажигания. Будет изменяться от 6 до 15 градусов. Угол опережения рассчитывается ЭБУ на основании показаний почти всех датчиков, даже температурного. Отдельного датчика угла опережения не существует. Потому идем далее.
INJ – продолжительность импульса впрыска. 3–5 мс на холостом ходу. Это время, на которое раскрывается любая форсунка для впрыска горючего в цилиндр. Если показания существенно огромные, может быть, форсунки засорены и требуют промывки, или давление горючего не достаточно вследствии засоренного топливного фильтра либо неисправного насоса. По-настоящему форсунки можно проверить лишь на особом щите. Для косвенной проверки резко жмем на педаль акселератора. Время впрыска также обязано скакнуть до 15–20 мс. Пока ограничимся данной процедурой.
FSM – количество шагов регулятора холостого хода (РХХ). Нередко его именуют датчиком холостого хода, хотя к семейству датчиков он никакого дела не имеет и представляет из себя шаговый электродвигатель с укрепленной на валу конусообразной «затычкой», которая перекрывает канал подачи воздуха в обход дроссельной заслонки, тем регулируя холостой ход. На холостом ходу этот параметр быть может в границах 40–60 шагов. При нажатии на педаль акселератора – возрастать до 150 – 180.
ALAM1 – напряжение на датчике кислорода до катализатора. При прогретом движке должен изменяться от 0,008 до 0,7В и назад, что гласит о исправно работающей оборотной связи.
LUMS_W – неравномерность вращения коленвала. Если больше, чем 4 о/с – означает, имеются пропуски воспламенения по цилиндрам. Повод проверить свечки и высоковольтные провода.
QT – расчетный расход горючего. На холостом ходу – 0,6–0,9 л/час. Естественно, для полной диагностики лучше проверить давление в топливной рампе, напряжение пробоя в свечках зажигания, поглядеть компрессию по цилиндрам, ну и СО выяснить не помешает. Но все это просит дорогостоящего оборудования и еще большего опыта.
Одним словом, вот так сравнимо нетрудно Вы сможете без помощи других проверить исправность Вашей Калины. Вперед!
Источник: asonline.ru
Шаговые движки (подробный разбор 4 типов)
Общие сведения:
Шаговый движок — это бесколлекторный движок, ротор которого вращается не плавненько, а шагами (дискретно). Полный оборот ротора состоит из нескольких шагов. Меняя форму сигнала, количество импульсов, их продолжительность и фазовый сдвиг, можно задавать скорость вращения, направление вращения и количество оборотов ротора двигателя.
Шаговые движки состоят из ротора (подвижная часть) и статора (недвижная часть). На статоре устанавливают электромагниты, а части ротора взаимодействующие с электромагнитами производятся из магнитотвердого (движок с неизменными магнитами) либо магнитомягкого (реактивный движок) материала.
Виды шаговых движков по типу ротора:
По типу ротора, шаговые движки делятся на: движки с неизменными магнитами, реактивные движки и гибридные движки.

- Движок с неизменными магнитами (ротор из магнитотвердого материала). На роторе установлен один, либо несколько, неизменных магнитов. Количество полных шагов в одном обороте таковых движков, зависит от количества неизменных магнитов на роторе, и количества электромагнитов на статоре. Обычно в одном обороте от 4 до 48 шагов (один шаг от 7,5° до 90° ).
- Реактивный движок (ротор из магнитомягкого материала). Еще такие движки именуют движками с переменным магнитным сопротивлением. Ротор не имеет неизменных магнитов, он выполнен из магнитомягкого материала в виде многоконечной звезды. Данные движки встречаются изредка, потому что у их меньший вращающий момент, по сопоставлению с остальными, при тех же размерах. Количество полных шагов в одном обороте таковых движков, зависит от количества зубцов на звезде ротора, и количества электромагнитов на статоре. Обычно в одном обороте от 24 до 72 шагов (один шаг от 5° до 15°.)
- Гибридный движок (совмещает технологии 2-ух прошлых движков). Ротор выполнен из магнитотвердого материала (как у двигателя с неизменными магнитами), но имеет форму многоконечной звезды (как у реактивного двигателя). Количество полных шагов в одном обороте таковых движков, зависит от количества неизменных магнитов на звезде ротора, и количества электромагнитов на статоре. Количество шагов в одном обороте таковых движков может доходить до 400 (один шаг от 0,9°).
Какой тип шагового двигателя у меня?
Если вручную покрутить ротор отключённого двигателя, то можно увидеть, что он движется не плавненько, а шагами. Опосля того, как Вы покрутили ротор, замкните все провода двигателя и покрутите ротор повторно. Если ротор вертится также, означает у Вас реактивный движок. Если для вращения ротора требуется прикладывать больше усилий, означает у вас движок с неизменными магнитами либо гибридный. Отличить движок с неизменными магнитами от гибридного можно подсчитав количество шагов в одном обороте. Для этого не непременно считать все шаги, довольно приблизительно осознать, их меньше 50 либо больше. Если меньше, означает у Вас движок с неизменными магнитами, а если больше, означает у Вас гибридный движок.
Виды шаговых движков по типу соединения электромагнитов статора:
По типу соединения электромагнитов, шаговые движки делятся на: униполярные и биполярные.

На рисунке представлено упрощённое, схематическое, представление обмоток.
По сути, любая обмотка состоит из нескольких обмоток электромагнитов, соединённых поочередно либо параллельно
- Биполярный движок имеет 4 вывода. Выводы A и A питают обмотку AA, выводы B и B питают обмотку BB. Для включения электромагнита, на выводы обмотки нужно подать разность потенциалов (два различных уровня), потому движок именуется биполярным. Направление магнитного поля зависит от полярности потенциалов на выводах.
- Униполярный движок имеет 5 выводов. Центральные точки его обмоток соединены меж собой и являются общим (пятым) выводом, который, обычно, подключают к GND. Для включения электромагнита, довольно подать положительный потенциал на один из выводов обмотки, потому движок именуется униполярным. Направление магнитного поля зависит от того, на какой конкретно вывод обмотки подан положительный потенциал.
- 6-выводной движок имеет ответвление от центральных точек обмоток, но обмотка AA не соединена с обмоткой BB. Если не употреблять выводы центральных точек обмоток, то движок будет биполярным, а если эти выводы соединить и подключить к GND, то движок будет униполярным.
- 8-выводной движок является более гибким в плане подключения электромагнитов. Данный движок можно не только лишь употреблять как биполярный либо униполярный, да и самим определять, как соединить электромагниты обмоток, поочередно либо параллельно.
Какой тип шагового двигателя у меня?
Если у Вашего двигателя 4 вывода, означает он биполярный. Если у Вашего двигателя 5 выводов, означает он униполярный. Но если у Вашего двигателя 6 и наиболее выводов, то это не означает что некие из их являются центральными выводами катушек электромагнитов. Дело в том, что есть движки, некие выводы которых (обычно последние), электрически замкнуты, так биполярный движок может иметь 6 выводов. Буквально найти тип соединений, для движков с 6 и наиболее выводами, можно лишь измеряя сопротивление меж выводами.
Режимы работы шаговых движков:
-
Для работы шагового двигателя (вне зависимости от его вида) можно избрать один из 3-х режимов работы:
- Полношаговый режим – ротор поворачивается на 1 шаг за 1 такт.
- Полушаговый режим – ротор поворачивается на ½ шага за 1 такт.
- Микрошаговый режим – ротор поворачивается на ¼, ⅛ и т.д. шагов за 1 такт.
Ниже рассмотрены режимы работы, на примере биполярного двигателя с неизменным магнитом и полным шагом 90°.
Полношаговый режим (одна фаза на полный шаг). Номинальные значения шагового двигателя указываются конкретно для этого режима.

Полношаговый режим (две фазы на полный шаг). Этот режим дозволяет прирастить вращающий момент практически в половину от номинального.

Полушаговый режим. Этот режим дозволяет прирастить количество шагов в полном обороте вдвое, при незначимом уменьшении вращающего момента.

Микрошаговый режим. Этот режим является более распространённым, он дозволяет прирастить количество шагов в полном обороте вчетверо, благодаря неравномерному распределению токов в обмотках. Понижение токов можно достигнуть понижением напряжения (как показано на картинке) либо подавать полное напряжение через подключаемую внешнюю нагрузку.

Если подавать уровни не «0» – «½» – «1» (как на картинке), а «0» – «¼» – «½» – «¾» – «1», то количество шагов в полном обороте возрастет не в 4 раза, а в 8 раз. Можно прирастить количество шагов в 16, 32, 64 раза и т.д., а если поменять дискретные уровни сигналов на синусоиды, то мотор будет вращаться плавненько (без шагов).
Режимы пониженного энергопотребления – доступны лишь для 8-выводных движков. Эти режимы различаются от обыденных тем, что употребляют лишь половину фазы (половину электромагнитов). Данные режимы употребляются изредка, потому что они существенно понижают вращающий момент двигателя.

Пример работы шаговых движков с различными видами роторов:

Подключение шаговых движков к Arduino:
Электромоторы недозволено подключать к выводам Arduino впрямую, потому что они потребляют значимые токи, шаговые движки не являются исключением, потому их подключают через драйверы.
Большая часть драйверов работают или с биполярными движками, или с униполярными.
- Биполярный движок можно подключить лишь к драйверу биполярных движков.
- 6-выводной движок можно подключить к хоть какому драйверу. Если не употреблять выводы центральных точек обмоток, то движок будет биполярным, а если эти выводы соединить и подключить к GND, то движок будет униполярным.
- 8-выводной движок является более гибким в плане подключения. Данный движок можно не только лишь употреблять как биполярный либо униполярный, да и самим определять, как соединить электромагниты обмоток снутри двигателя, поочередно либо параллельно.
- Униполярный движок, по мере необходимости, можно подключить и к драйверу биполярного двигателя по обычной схеме из нескольких диодов (лучше употреблять диоды Шоттки), но такое подключение гарантирует правильность работы униполярного двигателя лишь в полношаговом режиме.
Источник: wiki.iarduino.ru
Подключение шагового двигателя к Ардуино

Шаговый движок Arduino ► предназначен для перемещения объекта на данное количество шагов вала. Разглядим устройство и схему подключения шагового двигателя.
Шаговый движок (stepper motor) предназначен для четкого позиционирования либо перемещения объекта на данное количество шагов вала. Плата Arduino может управлять шаговым движком при помощи драйвера и библиотеки stepper.h либо accelstepper.h. Разглядим механизм работы и схему подключения шагового двигателя к Arduino Uno / Nano, также разберем скетч для управления шаговым мотором.
Механизм работы шагового двигателя
Зависимо от конструкции, сейчас используются три вида шаговых движков: с неизменным магнитом, с переменным магнитным сопротивлением и гибридные движки. У движков с неизменным магнитом число шагов на один оборот вала доходит до 48, другими словами один шаг соответствует повороту вала на 7,5°. Гибридные движки обеспечивают не меньше 400 шагов на один оборот (угол шага 0,9°).
Фото. Устройство шагового мотора в разрезе
Подсчитав количество изготовленных шагов, можно найти четкий угол поворота ротора. Таковым образом, шаговый движок является сейчас безупречным приводом в 3D принтерах, станках с ЧПУ и в другом промышленном оборудовании. Это только лаконичный обзор устройства и механизма работы stepper motor, нас больше интересует, как осуществляется управление шаговым движком при помощи Ардуино.
Драйвер шагового двигателя Ардуино
Шаговый движок — это бесколлекторный синхронный движок, как и все движки, он конвертирует электронную энергию в механическую. В отличие от двигателя неизменного тока в каких происходит вращение вала, вал шаговых движков совершает дискретные перемещения, другими словами вращается не повсевременно, а шагами. Любой шаг вала (ротора) представляет собой часть полного оборота.
Фото. Виды драйверов для управления шаговым движком
Вращение вала двигателя осуществляется при помощи сигнала, который управляет магнитным полем катушек в статоре драйвера. Сигнал генерирует драйвер шагового двигателя. Магнитное поле, возникающее при прохождении электронного тока в обмотках статора, принуждает вращаться вал, на котором установлены магниты. Количество шагов задаются в программке при помощи библиотеки Arduino IDE.
Схема подключения шагового двигателя 28BYJ-48 к Arduino Uno через драйвер ULN2003 изображена на рисунке ниже. Главные свойства мотора 28BYJ-48: питание от 5 либо 12 Вольт, 4-х фазный движок, угол шага 5,625°. Порты драйвера IN1 — IN4 подключаются к хоть каким цифровым выводам платы Arduino Mega либо Nano. Светодиоды на модуле служат для индикации включения катушек двигателя.
Как подключить шаговый движок к Ардуино
Для занятия нам пригодятся последующие детали:
- плата Arduino Uno / Arduino Nano / Arduino Mega;
- драйвер шагового двигателя ULN2003;
- шаговый движок 28BYJ-48;
- провода «папа-мама».
Схема подключения шагового двигателя к Arduino UNO
Источник: xn--18-6kcdusowgbt1a4b.xn--p1ai
Пользующиеся популярностью заблуждения о шаговых электродвигателях и их объяснения
Даже бывалые инженеры нередко имеют не совершенно верное представление о шаговых электродвигателях и методах управления ими. В данной статье мы разберем только несколько главных заблуждений что, надеюсь, поможет и новеньким и опытным инженерам при выбирании драйверов управления. Было бы отлично разобрать все индивидуальности, но тогда эта статья перевоплотился бы в книжку.
В данной статье пойдет речь о биполярных шаговых электродвигателях, так как они являются более пользующимися популярностью в использовании на нынешний денек. Униполярные шаговые электродвигатели все еще употребляются в неких устройствах, но их популярность с каждым годом понижается. Это понижение обуславливается доминированием относительно дешевых драйверов для биполярных движков. Беря во внимание понижение цены управления, почему бы не употреблять биполярные шаговые электродвигатели? В конце концов у их еще есть один плюс – больший вращающий момент.
Температура
Почти все инженеры неверно считают, что если шаговый электродвигатель имеет маленькой размер, означает, его температура тоже обязана быть маленькой. Этот миф просто развеять, взяв документацию на электронную машинку, пирометр, и произвести застыл. То, что при касании может показаться «весьма жарким», по сути не будет даже подступать к очень допустимой температуре машинки. Шаговые электродвигатели обычно имеют завышенную температуру, это соединено с внутренними действиями в самой машине. Даже когда они не вращаются они также подвержены потерям. Тем не наименее, если вы сомневаетесь – перестрахуйтесь и проверьте температуру. Естественно, если температура превзойдет максимально допустимую, обозначенную в паспорте, это может привести к необратимым последствиям (выход из строя либо существенное сокращение срока службы).

В вариантах, когда есть необходимость понизить потребление электроэнергии в режиме простоя, можно употреблять особые драйверы, в которые данная функция включена. Но это воздействует не только лишь на значение тока в обмотках, да и на удерживающий момент, что в определенных механизмах тоже принципиально.
Микрошаговый режим
Микрошаги это не мистика. Есть особые драйверы для микрошагового управления. Это дозволяет прирастить точность позиционирования, но получается из-за значимого вращающего момента. Не считая того, наличие драйвера, обеспечивающего шаг 1/32, не означает, что ваш электродвигатель сумеет это воплотить. Опосля определенного порога (1/10 и время от времени 1/16) требуются качественные драйверы и движки. Даже если ваш шаговый электродвигатель и драйвер сумеют воплотить микрошаг в 1/32, может быть ли это интегрировать в общую систему управления?

Разглядим последующий пример. Линейное перемещение с 10 шагами на дюйм ходового винта впрямую соединенного с обычным шаговым движком, имеющим 200 шагов на оборот. Любой полный шаг электронной машинки будет переведен в 0,0005 дюйма линейного движения. Чудилось бы, что, типо, та же система микрошагов 1/32 сумеет уменьшить линейный шаг до 0,000015. Но в действительности реализации данной системы фактически не вероятна, потому что упругость и силы трения не дозволят конвертировать так маленькие шаги к линейному движению.
Микрошаговый режим реально полезен при проверке системы с шаговой электронной машинкой на резонанс. Это дает определенные способности для избегания резонанса. Как понятно, неважно какая механическая система имеет резонансную частоту. Для шаговых электродвигателей достижение данной частоты, обычно, происходит на определенной скорости, опосля чего же движок начнет очень шуметь. Эти шумы могут привести к «пропусканию шагов», что чревато суровыми последствиями для определенных систем. В неких вариантах это может привести к очень огромным вибрациям. В вариантах с режущими машинками, таковыми как токарные станки, этот звук можно спутать с рабочим звуком обработки поверхности заготовки. Микрошаговый режим уменьшает расстояние пройденное валом меж шагами (на возникновение шумов тратится меньше энергии).
Номинальное напряжение и напряжение питания
Наверняка, одним из самых запутанных моментов является несоответствие напряжения на обмотке, обозначенного в паспорте машинки, и настоящего напряжения источника питания, применяемого для питания электронной машинки. Если в техпаспорте указывается напряжение обмотки равное 3,4 В, то как выходит, что электродвигатель подключается к источнику 48 В неизменного тока? Либо время от времени и к 80 В.
Номинальное напряжение не так критично, направьте внимание на ток.
Такое подключение сделалось вероятным благодаря тому, что большая часть современных драйверов имеют встроенное ШИМ управление выходным напряжением. Драйверы контролируют ток обмотки. Когда ток доходит до наибольшего значения (определяется наибольшим током электронной машинки), драйвер отключает питание, либо понижает значение тока. При всем этом превосходить наибольшее напряжение драйвера недозволено.
Разглядим маленькой пример на базе шагового электродвигателя с номинальными данными: Uн = 12 В, Iн = 0,33 А, активное сопротивление обмотки R = 32,6 Ом, реактивное сопротивление обмотки L = 48 мГн.
12 В – это не очень допустимое напряжение. Это напряжение обычной работы, при котором в обмотке будет протекать ток равный 0,33 А.
Если вы управляете электронной машинкой при помощи весьма обычного либо Н-мостового драйвера, то для вас нужно ограничивать напряжение 12 В для предотвращения превышения номинального тока.
В случае использования драйвера с прерывателем (chopper drive), превышение номинального напряжения не является неувязкой. Чем выше будет напряжение – тем резвее машинка достигнет магнитного насыщения. Приведенная ниже формула это иллюстрирует:

Приведенная формула вычисляет ток обмотки электродвигателя за определенный просвет времени.

Ток, через катушку индуктивности 50 мГн, в течении 1 мс возрастает пропорционально напряжению.
Если движок «перескочит» до этого, чем сумеет довольно насытиться для развития нужного момента, он начнет «терять» шаги. Если вы обнаружите, что такое происходит с вашей машинкой на большенном ходу – разглядите вариант увеличения напряжения питания.
Источник: elenergi.ru